

Auburn REU
To change the appearance of the page, edit the styles of the corresponding elements (in most cases by using the "Main Frame" Style Zone).
To change the menu’s links: edit, copy-paste, or delete the Link Elements within.
To hide an element without deleting it, use its property Visible.
To change the menu’s links: edit, copy-paste, or delete the Link Elements within.
To hide an element without deleting it, use its property Visible.
-WE3a80f12815.jpg)
Research Experience for Undergraduates - Smart UAVs
Auburn University
Summer 2016
NSF Funded
Auburn University
Summer 2016
NSF Funded
Project 1: Computer Vision "See and Avoid" Simulation using OpenGL and OpenCV
Project 2: Ballistic Recovery Parachute for Unmanned Aerial Vehicles (UAVs)
Project 2: Ballistic Recovery Parachute for Unmanned Aerial Vehicles (UAVs)
To "activate" displaying of an arrow, use its property "Visible"
Project 1: Computer Vision
Motive:
UAVs are continuing to evolve into the market for the everyday consumer at a rate faster than ever before. Over time, there have been studies regardings autonomous UAV flight. A great deal of this research is focussed toward collision avoidance in various ways. Some avoidance algorithms include external sensors and node-to-node communication. In correlation with FAA regulation, it is important to maintain a safe flying environment for all involved. This project will attempt to understand computer vision techniques so that "see and avoid" algorithms can be implemented on autonomous UAVs.
Abstract:
In order to maintain safe flying environments and avoid disastrous midair collisions, the U.S. Federal Aviation Administration mandates that pilots must "See and Avoid" other aircraft. This work develops a See-And-Avoid SAA) system for autonomous Unmanned Aircraft Systems (UAS) and present a novel approach to implement SAA capabilities using simulated cockpit video and computer vision algorithms. The cockpit video is generated using the computer graphics library OpenGL. The computer vision library OpenCV is used to construct algorithms for background filtering, obstacle detection, and collision avoidance. A distance-based and a distance-agnostic algorithms were developed and evaluated on the proposed test bed. Preliminary results with scenarios with two, three or four planes are promising: the two algorithms significantly decrease the number of collisions.
Motive:
UAVs are continuing to evolve into the market for the everyday consumer at a rate faster than ever before. Over time, there have been studies regardings autonomous UAV flight. A great deal of this research is focussed toward collision avoidance in various ways. Some avoidance algorithms include external sensors and node-to-node communication. In correlation with FAA regulation, it is important to maintain a safe flying environment for all involved. This project will attempt to understand computer vision techniques so that "see and avoid" algorithms can be implemented on autonomous UAVs.
Abstract:
In order to maintain safe flying environments and avoid disastrous midair collisions, the U.S. Federal Aviation Administration mandates that pilots must "See and Avoid" other aircraft. This work develops a See-And-Avoid SAA) system for autonomous Unmanned Aircraft Systems (UAS) and present a novel approach to implement SAA capabilities using simulated cockpit video and computer vision algorithms. The cockpit video is generated using the computer graphics library OpenGL. The computer vision library OpenCV is used to construct algorithms for background filtering, obstacle detection, and collision avoidance. A distance-based and a distance-agnostic algorithms were developed and evaluated on the proposed test bed. Preliminary results with scenarios with two, three or four planes are promising: the two algorithms significantly decrease the number of collisions.
Source Code:
All code for the OpenGL and OpenCV project is available on a public bitbucket repository. Please feel free to continue to develop this project as one may see fit.
All code for the OpenGL and OpenCV project is available on a public bitbucket repository. Please feel free to continue to develop this project as one may see fit.
Project 2: Ballistic Parachute
Motive:
With a rise of UAV utilization in the civilian market, the concern for safety is greater than every before. According to current FAA regulations, an aircraft, at any point in time, must have sufficient "fuel" to land safely. Often, it is hard to determine how much "fuel" a UAV may have left, since LiPo battery voltage decreases exponentially as power diminishes. The ballistic parachute recoversystem is designed as a safeguard, of which is deployed once the battery is low, the UAV is in free fall, or the the UAV extends outside of specified GPS coordinates. The following information provides information utilized for successful completion of this project.
Abstract:
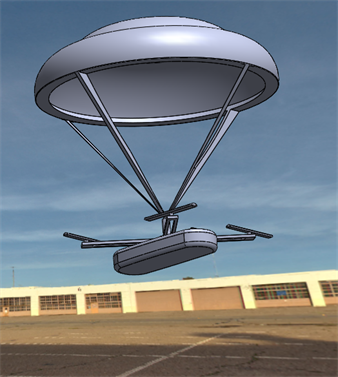
As micro controller technology continues to grow and develop, Unmanned Aerial Vehicles (UAVs) are experiencing explosive growth in civilian, commercial, and governmental sectors. To maintain a safe environment for all involved, the Federal Aviation Administration (FAA) has implemented regulations on UAVs to promote safety and prevent airborne collisions. Several requirements limit hobbyists and professionals while behind the controls of an aircraft. To help prevent failures in UAV operation, a ballistic parachute recovery system monitors several components of real-time flight, that will ultimately help ensure a safe airspace for time to come.
Motive:
With a rise of UAV utilization in the civilian market, the concern for safety is greater than every before. According to current FAA regulations, an aircraft, at any point in time, must have sufficient "fuel" to land safely. Often, it is hard to determine how much "fuel" a UAV may have left, since LiPo battery voltage decreases exponentially as power diminishes. The ballistic parachute recoversystem is designed as a safeguard, of which is deployed once the battery is low, the UAV is in free fall, or the the UAV extends outside of specified GPS coordinates. The following information provides information utilized for successful completion of this project.
Abstract:
As micro controller technology continues to grow and develop, Unmanned Aerial Vehicles (UAVs) are experiencing explosive growth in civilian, commercial, and governmental sectors. To maintain a safe environment for all involved, the Federal Aviation Administration (FAA) has implemented regulations on UAVs to promote safety and prevent airborne collisions. Several requirements limit hobbyists and professionals while behind the controls of an aircraft. To help prevent failures in UAV operation, a ballistic parachute recovery system monitors several components of real-time flight, that will ultimately help ensure a safe airspace for time to come.
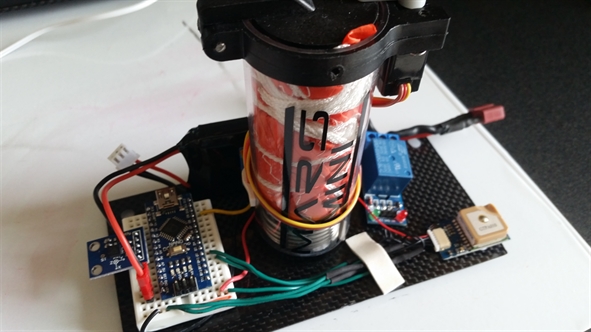
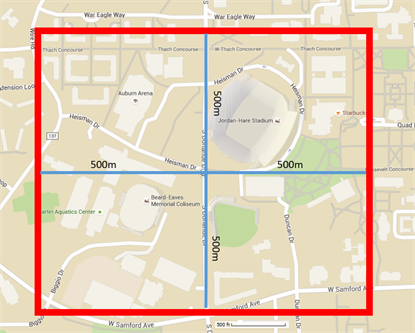
Recovery System Design GPS Bounding Airspace
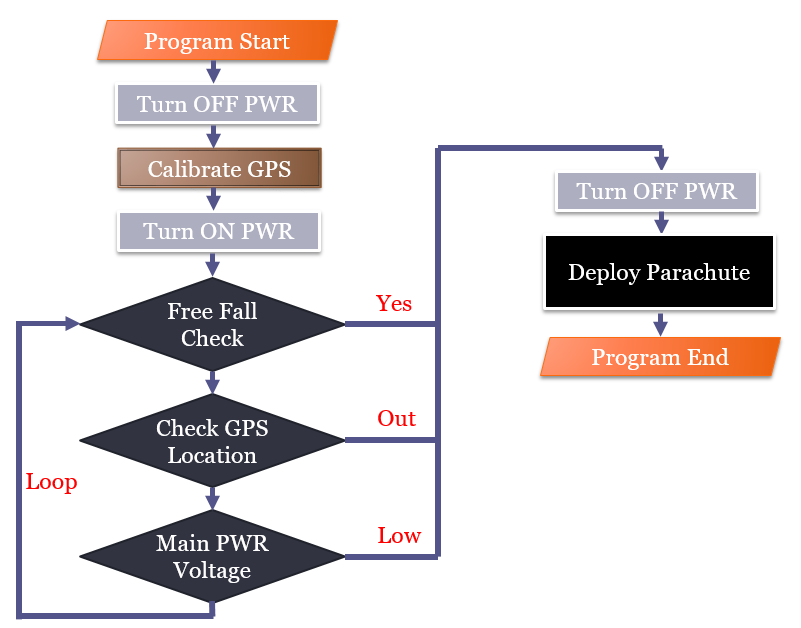
Software Monitor Concept of Recovery System
Software Monitor Concept of Recovery System
Source Code:
All code for the ballistic parachute recovery project is available on a public bitbucket repository. Also included in the repository are powerpoint and test files used during the design process. Please feel free to continue to develop this project as one may see fit.
All code for the ballistic parachute recovery project is available on a public bitbucket repository. Also included in the repository are powerpoint and test files used during the design process. Please feel free to continue to develop this project as one may see fit.