Invited Seminar, Panel, Workshop, and Lecture Talks
IP12. Yale University. Building Interactive Machine course taught my Prof. Marynel Vázquez. Fall 2025.
Title: "Building More Capable Robots"
IP11. Imperial College London. Electrical Engineering Department Seminar Series. Spring 2025.
Title: "Intelligent Hands"
IP10. Massachusetts Institute of Technology. Sloan AI Club Lecture. Spring 2025.
Title: "Embodied Intelligence"
IP9. Worcester Polytechnic Institute. Robotics Department Lecture. Spring 2025.
Title: "Intelligent Hands"
IP8. Rice University. Robot Manipulation Lecture. Fall 2023.
Title: "The complexities we face in robot in-hand manipulation"
IP7. TU Berlin. RBO Seminar. Spring 2023.
Title: "Towards Online Planning for Compliant Robot In-hand Manipulation"
IP6. Carnegie Mellon University. Interactive Autonomous Machines Meeting. Virtual. 2023.
Title: "Compliant Robot Manipulation: relaxing constraints for in-hand manipulation"
IP5. University of Chicago, Introduction to Robotics Course, Panel Discussion, Spring 2022
Title: "Perspectives on entering robotics research"
IP4. Instituto Superior Técnico, Robotics Seminar Series, Lisbon, Portugal, Spring 2022
Title: "Compliance-enabled in-hand manipulation"
IP3. Yale University, CPSC 559 Building Interactive Machines, New Haven, CT, Fall 2021
Title: "On the Utility of Compliance for Manipulation"
IP2. Technische Universität Darmstadt Intelligent and Autonomous Systems (IAS) Seminar Series, Virtual, Fall 2021
Title: "Challenges of In-Hand Manipulation"
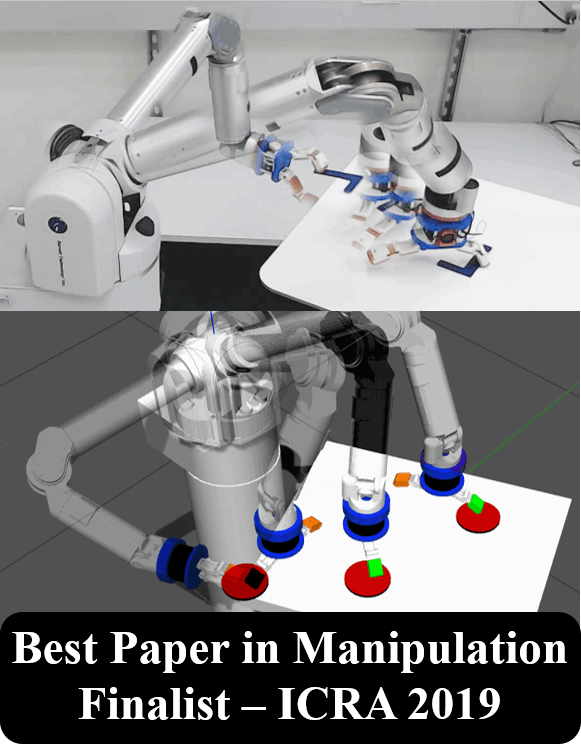
IP1. ICRA Workshop, "Benchmarks for Robotic Manipulation", Montreal, Canada, Summer 2019
Title: "The Box and Blocks Test in Cluttered Robot Pick-and-Place Applications"
Oral Conference Talks
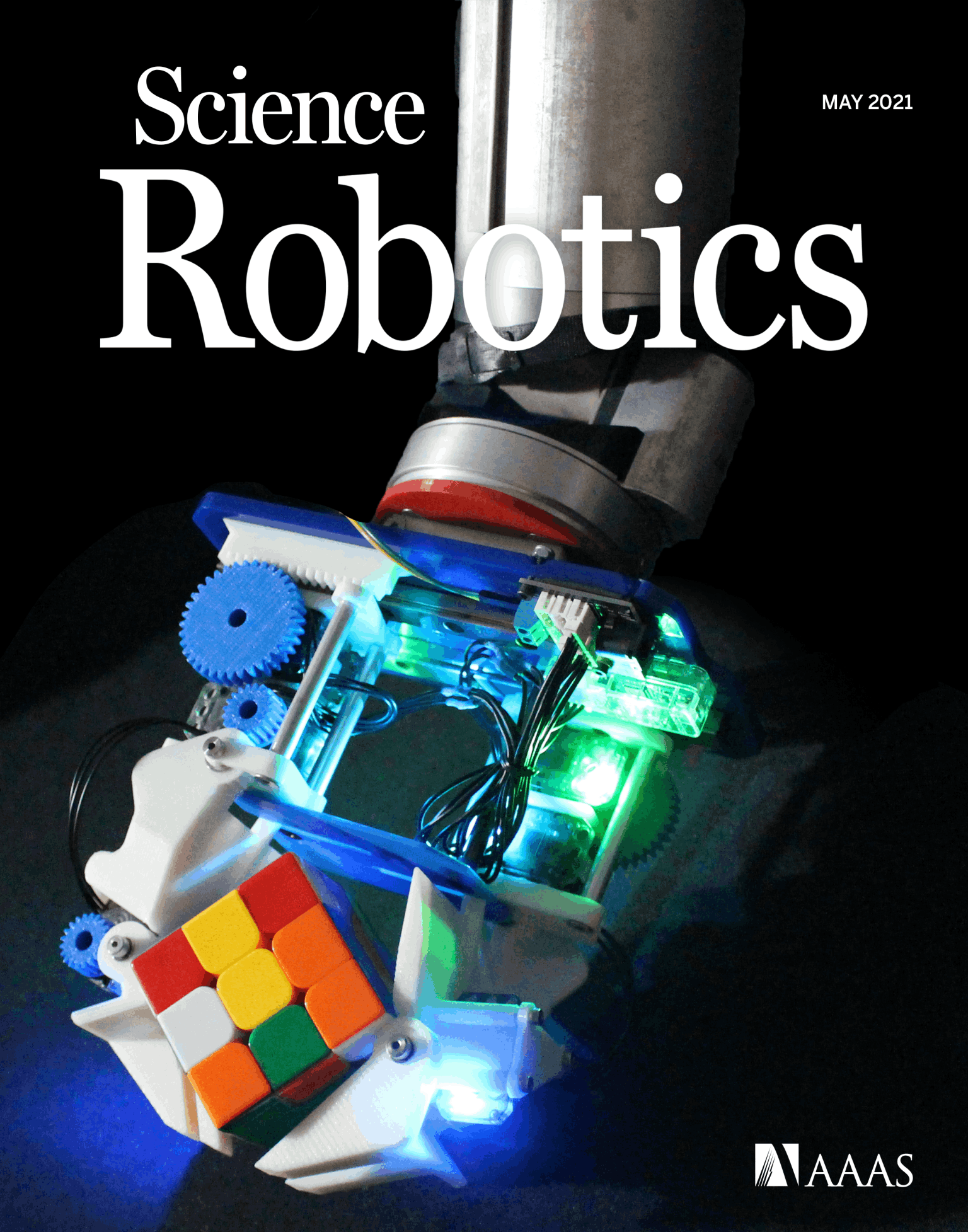
OP8. ICRA, Philadelphia, PA, USA, 2022
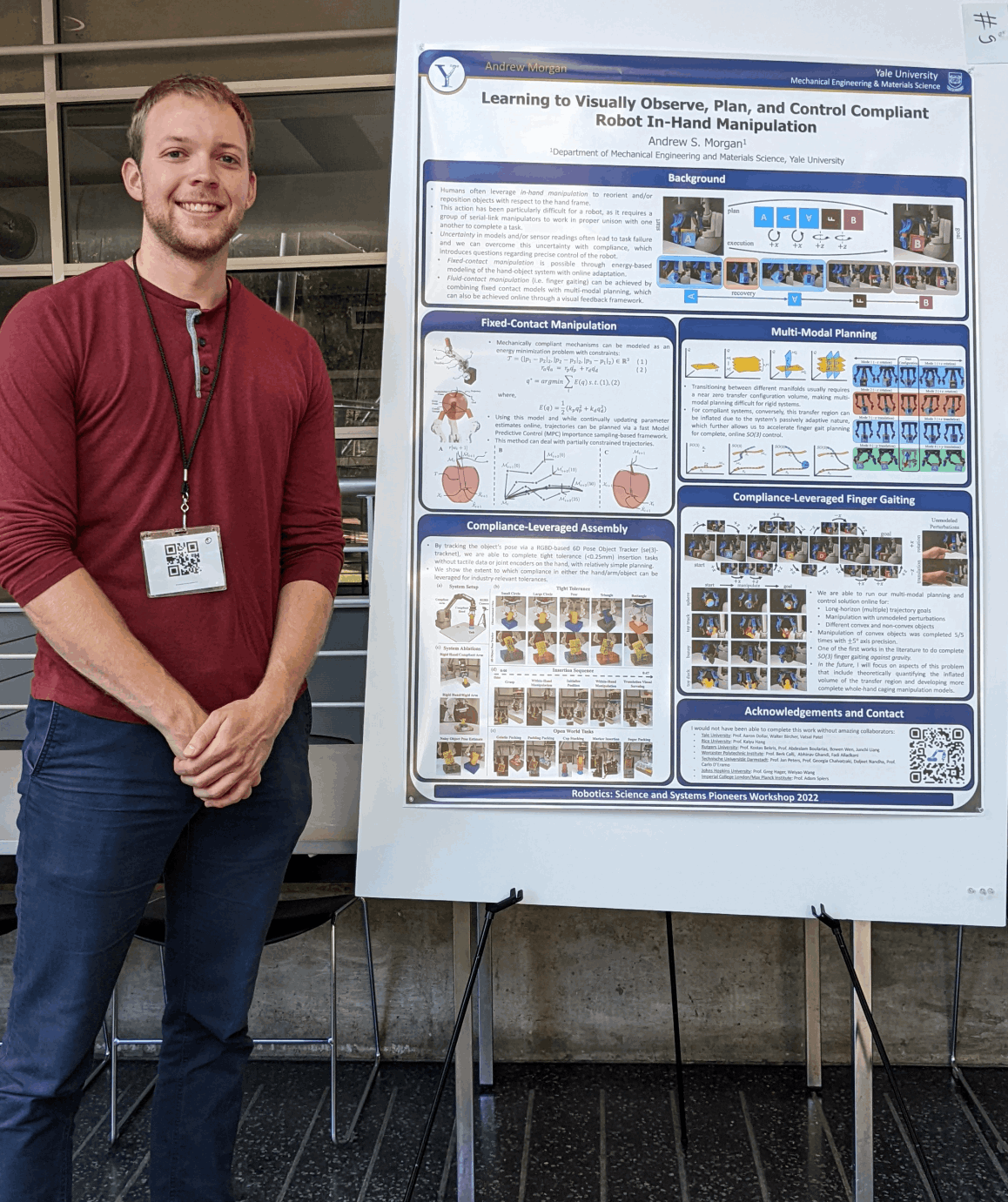
Title: "Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning"
OP7. IROS, Macau, China, 2019
Title: “A Data-Driven Framework for Learning Dexterous Manipulation of Unknown Objects"
OP6. IROS, Macau, China, 2019
Title: "Unstructured Terrain Navigation and Topographic Mapping with a Low-cost Mobile Cuboid Robot"
OP5. Coalition for Life Sciences - Life Science Fair 2019. Capitol Hill, Washington D.C., 2019
Title: "Design Process Towards Robotic and Prosthetic Hands"
OP4. ICRA Workshop on Benchmarking in Manipulation, Montreal, Canada, 2019
Title: “The Box and Blocks Test in Cluttered Robot Pick-and-Place Applications”
OP3. YSU’s QUEST: a Forum for Undergraduate Research, Youngstown, OH, 2017
Title: “Digital Licensing Platform for Retro Games”
Best Honors College Project Award
OP2. NSF Emerging Researchers National Conference, Washington DC, 2017
Title: “Computer Vision ‘See and Avoid’ Simulation using OpenGL and OpenCV”
Second Place winner in Computer Sciences
OP1. Gulf Coast Undergraduate Research Symposium, Houston, TX, 2016
Title: “Computer Vision ‘See and Avoid’ Simulation using OpenGL and OpenCV”
Poster Conference Presentations
PP8. ICRA, London, UK, 2023.
Title: "Towards Generalized Robot Assembly through Compliance-Enabled Contact Formations"
PP8. ICRA, Philadelphia, PA, USA, 2022
Title: "Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning"
PP7. Robotics: Science and Systems (RSS) 2021, Virtual
Title: "Vision-driven Compliant Manipulation for Reliable, High-Precision Assembly Tasks"
PP6. Coalition for Life Sciences-Life Science Fair 2019, Capitol Hill, Washington D.C., Winter 2019
Title: "Design Process Towards Robotic and Prosthetic Hands"
PP5. International Conference on Robotics and Automation, Montreal, Canada, 2019
Title: “Learning from Transferable Mechanics Models: Generalizable Online Mode Detection in Underactuated Dexterous Manipulation”
PP4. International Conference on Robotics and Automation, Montreal, Canada, 2019
Title: “Energy Gradient-Based Graphs for Planning Within-Hand Caging Manipulation”
PP3. New England Manipulation Symposium, New Haven, CT, 2018
Title: “Data Driven Detection of Manipulation States”
PP2. American Society for Engineering Education National Conference, New Orleans, LA, 2016
Title: “3D Printing in a First-Year Engineering Design Project”
PP1. Koli Workshop, Koli, Finland, 2014
Title: “Understanding a Novice Programmer’s Progression of Reading and Summarizing Code”